* New series of R.T.A. drives with EtherCAT communication system.
* Drives optimized for coupling to SANYO DENKI stepper motors feedbacked by encoder.
* Compact system, equipped with a full range of integrated features optimized for the most demanding motion control applications.
HIGHLIGHTS
* Operation with EtherCAT protocol.
* Operating modes: Profile Position, Profile Velocity, Homing, CSV and CSP.
*Full digital microstepping drive.
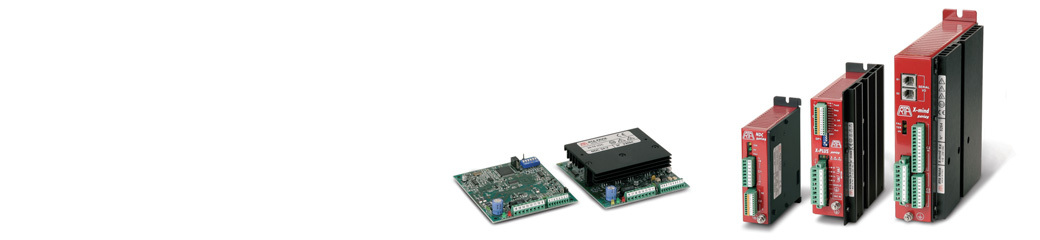
* Extremely compact dimensions.
* Highly advanced control system, capable of preserving the traditional simplicity of use of R.T.A. drives
* STO Function
* Version: drive housed in a metallic box 90 x 99 x 21 mm, equipped with plug-in connectors.
* Range of operating voltages: 24-48 VDC.
* Range of current: 2.6-4.4 Amp. Setting up to eight possible values by means of a dip-switch.
* Microstepping: 400, 800, 1.600, 3.200 steps/revolution. Setting by means of a dip- switch.
* Management of the current profile setting by means of a dip-switch.
* Automatic current reduction at motor standstill.
* Protections:
-Protection against under-voltage and over-voltage.
-Protection against a short-circuit at motor outputs.
-Overtemperature protection with thermal sensor.
* Electronic damping facility for further acoustic noise and mechanic vibrations reduction.
* Adaptive microstepping.
* UL Recognized.
* STO Function
* Warranty: 24 months.
SETTING BY MEANS OF EtherCAT INTERFACE
* Wide range of motor phase current setting.
* Motor current overboost.
* Intelligent management of the current profile.
* Communication by means of EtherCAT (CoE) interface.
* Modes of operation: PROFILE POSITION and CSP.
* Different variety of HOMING operation modes.
* Encoder feedback.


